介绍一套比例遥控玩具及其生产测试系统
所谓比例遥控,就是指受控设备的动作幅度(或速度)与操纵者扳(转)动控制器操纵杆的动作成比例关系。例如扳动操纵舵的操纵杆到一半角度,那么受控玩具的方向舵也会转动到最大舵角的一半。比例遥控玩具的可玩性大大优于一般的开关型遥控玩具,后者只能对被控对象的电源通断进行控制。即使加上相应的机械装置,也只能工作在两个极限位置――要么全开,要么全关,而无法控制被控对象使之在整个动作范围内的任意位置都能按操控者的意愿动作并精确定位(例如控制航模的转弯角度)。随着电子技术的进步特别是集成电路的飞速发展,现在已经出现了多达数十通道的比例遥控设备了。所谓通道(Channel),简单地说就是指控制受控设备的一路相关功能。例如前进和后退是一路; 左右转向是一路。而航空模型中则是升降动作为一路;还可以是一组控制其他动作的(如炮塔的左右、上下俯仰、鸣笛、亮灯等),这样一般一个双通道的遥控设备就可以表演一些比较复杂的组合动作。比例遥控设备根据射频调制形式又分为调幅(AM)、调频(FM)和脉冲编码(PCM)等等,它们的抗干扰能力也不一样,AM型最差,但电路也最简单;FM型是用得比较多的一种;而PCM属于中高档型,抗干扰能力相对而言最强。为简单代表性起见,我们在此以一个双通道遥控系统为例来讨论相关技术细节及介绍一套相应的生产测试系统。
因为国家对无线电频率采用许可使用制度,另外为了防止同频干扰,遥控设备的使用频率是有相关规定的,我国相关部门给出的模型遥控器在27MHz公开频段内的使用频点如下表(括号里是FUTABA、JR等厂商所产设备配用的飘带颜色):
|
序号 |
1 |
2(茶色) |
3 |
4 (红色) |
5 |
6 (橙色) |
7 |
8(黄色) |
9 |
10(绿色) |
11 |
12(蓝色) |
|
频率(MHz) |
26.975 |
26.995 |
27.025 |
27.045 |
27.075 |
27.095 |
27.125 |
27.145 |
27.175 |
27.195 |
27.225 |
27.245 |
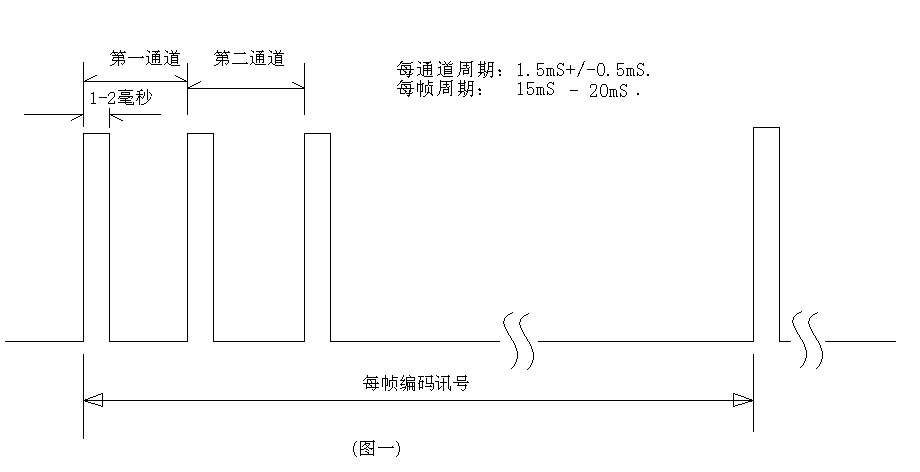
图一是Epoch.公司生产的一款模型车的遥控编码图,日本FUTABA 的T2DR等系列二通道调幅机的波形也完全相同。由图一可知本电路设计为二个通道,可进行二路控制。本装置采用时分制脉冲调宽编码方式。其编码信号按帧传送。帧周期为15-20ms。图二是该比例遥控调速电路的原理图。
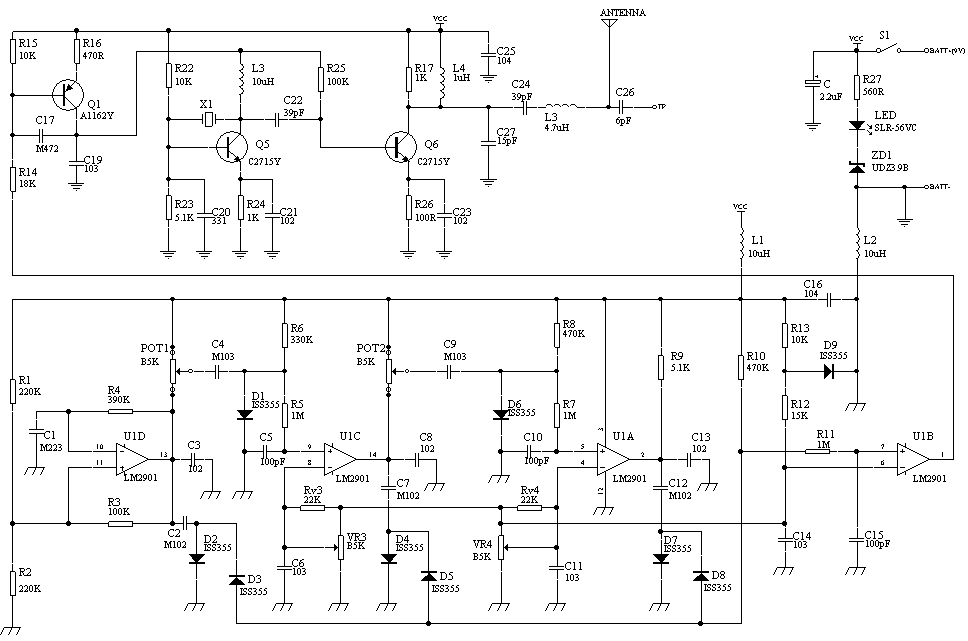
它由一块四运放集成电路LM2901组成,其中U1D接成多谐振荡器,用来产生15-20毫秒的帧周期信号。U1C与U1A分别构成两级下降沿触发的单稳电路,用来产生两个通道的调宽脉冲。POT1~POT1是两个通道的脉宽调节器,它们直接与遥控操纵杆相连。当调节操纵杆时,这些脉宽调节器可使对应通道的控制脉冲宽度在1.5±0.5ms范围内变化,通过接收端译码及伺服电路可使被控对象产生与操纵杆同步成比例的动作。该电路在工作时,首先由U1D产生周期为15-20ms的帧同步方波,并由C4送入第一级单稳,其下降沿使第一级单稳被触发,从而产生第一路控制脉冲,第一级脉冲的下跳沿又触发第二级单稳以产生第二路控制脉冲。每路脉冲宽度取决于操纵杆的位置(实际上是POT1~POT2的阻值)。两路控制脉冲的下跳沿经D3、D5、D8等组成的或门依次加到U1B组成的整形定宽单稳电路,再经整形后输出一列整齐的,周期变化而宽度固定为0.2ms的正脉冲如图一。VR3和VR4用于微调每对脉冲间间隔宽度,以补偿安装和零件差异等原因导致的POT1、POT2两个VR的位置和角度差别,每对脉冲之间的间隔宽度反映了控制脉冲的宽度。也就是一帧脉冲包含了完整的两路控制信息。U1B构成整形与定宽单稳电路。晶体管Q1构成放大及开关电路,用来调制Q6/Q5组成的27MHz RF振荡器形成AM输出。
当然,遥控玩具和航模车模等遥控模型的市场和产品类型覆盖面太广,技术要求也有不同需求,因此该编码方式并不是强制性的,各厂商也可能根据实际情况对应修改或者采用其它编码方式。例如部分航模的遥控系统就在每帧讯号的前面包含一个脉宽4ms的帧同步脉冲,如图三。
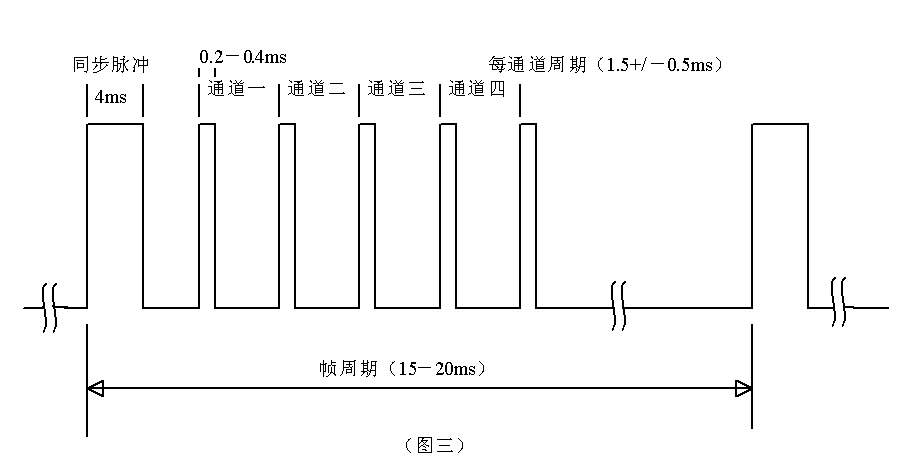
该波形表示系统有四个独立的遥控通道。另外也有采用数字编码系统的,例如PTI的PT8A995/998这一对双通道遥控IC就采用数字编码方式将每个通道的控制杆行程通过电位器转换为电压,其讯号编码格式如图四所示。
遥控杆位置讯号先经ADC转换量化为5Bit的数字讯号(00000-11111),然后分别插入固定编码的奇偶讯号帧之中经RF或者IR发送,由PT8A998接收后对应解码出来然后用于控制马达驱动器输出PWM脉宽。此系统除了两个通道外,还有四个开关量遥控,方便给系统增加功能例如开炮、鸣笛、亮灯、控制其它开关等。当然,本文所述的双通道系统也很容易增加两路成为四通道或更多通道的遥控系统,只要在U1A单元电路后面照样再串入两路或多路单稳电路即可,在此就不详述了。
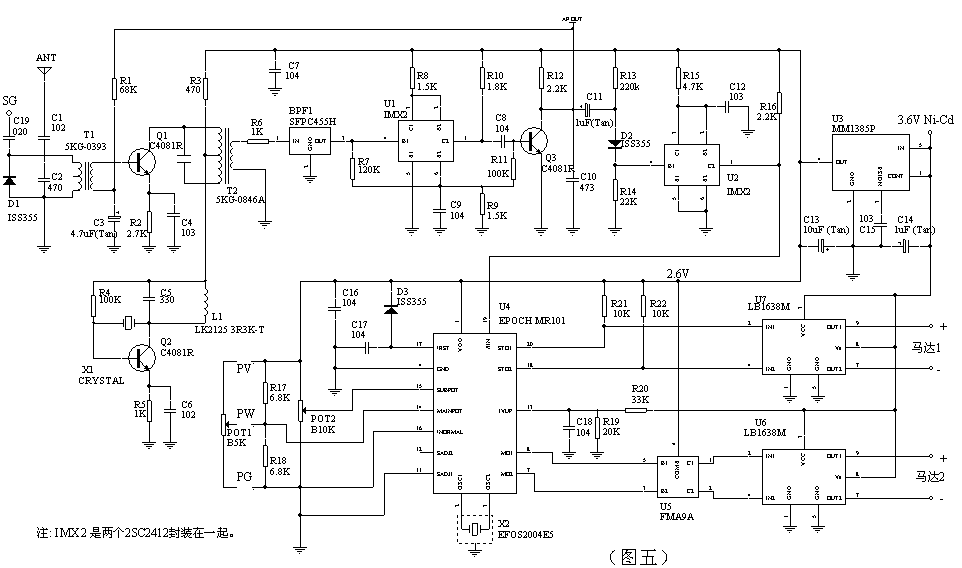
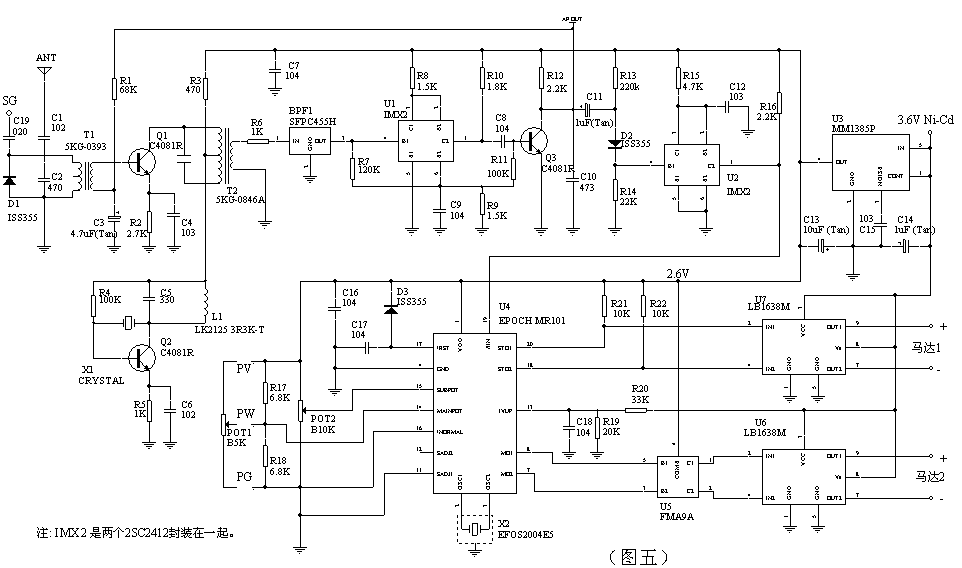
对应图二双通道遥控系统的接收部分如图五所示,该系统采用的是专用解码驱动电路。因为设计目标用于迷你车,体积极小,因此采用了3节1/3AAA尺寸的可充电镍镉电池,通过一个DC-DC降压转换IC-U3转换为2.5伏的稳定电压供系统使用。电路结构方面采用标准的超外差式接收电路,Q1混频,Q2本振,BPF1中频变换,U1、Q3中放并于Q3的集电极取出高放AGC控制讯号,U2低放及整形后的调宽脉冲送入解码和驱动IC-U4。由U4解码出来相应的通道讯息驱动马达1和马达2,其中马达2用于驱动车体前进/后退,因所需驱动能力较强,故加入了U5进行前置放大,U5是两个封装在一起的PNP带阻晶体管。马达1用于驱动前轮左右转向,POT1与转向牙箱组装在一起并随之连动,用于检测左右转的角度并反馈给解码IC以锁定该角度。POT2用于调整静态中点,保证左右控制杆处于静止(中点)时车体准确直行。
因为采用了超外差接收电路并具有三级带AGC的中放,该套遥控系统一般情况下接收灵敏度超过-95dBm。配合本文遥控器遥控距离可达30-50米,加之接收部分采用超低耗电设计,适合于制造最小尺寸低达2吋的车模、航模等。可谓一套非常典型的高性能遥控玩具系统。
接下来我们再谈谈遥控玩具的生产测试系统。它一直以来是困扰国内大部分生产厂家的老大难问题,有了一套优秀的产品设计方案,如果不能提供相应高质量的生产测试系统,仍然无法保证产品良率,特别是有些环节需要在生产线上作现场调整的,例如接收板对中(即上文所述调整POT2以调整左右偏转的静态中点)等,必须要在生产时完成,因此迫切需要一套完善的机夹具系统。鉴于此,我们在此同时介绍一套配套用于上述产品的测试系统。
对于发射板的测试和调整,主要有整机耗电电流、按键/旋钮功能、编码输出波形以及调制后射频输出幅度(输出功率)等测试项目,测试机架连线相对而言比较简单,但是对于接收板的现场调试,需要测试的参数更多,因此在此只介绍针对接收板的完整的基于8051单片机的测试系统,并附上相应的单片机源程序和目标代码,供有需要的读者参考。
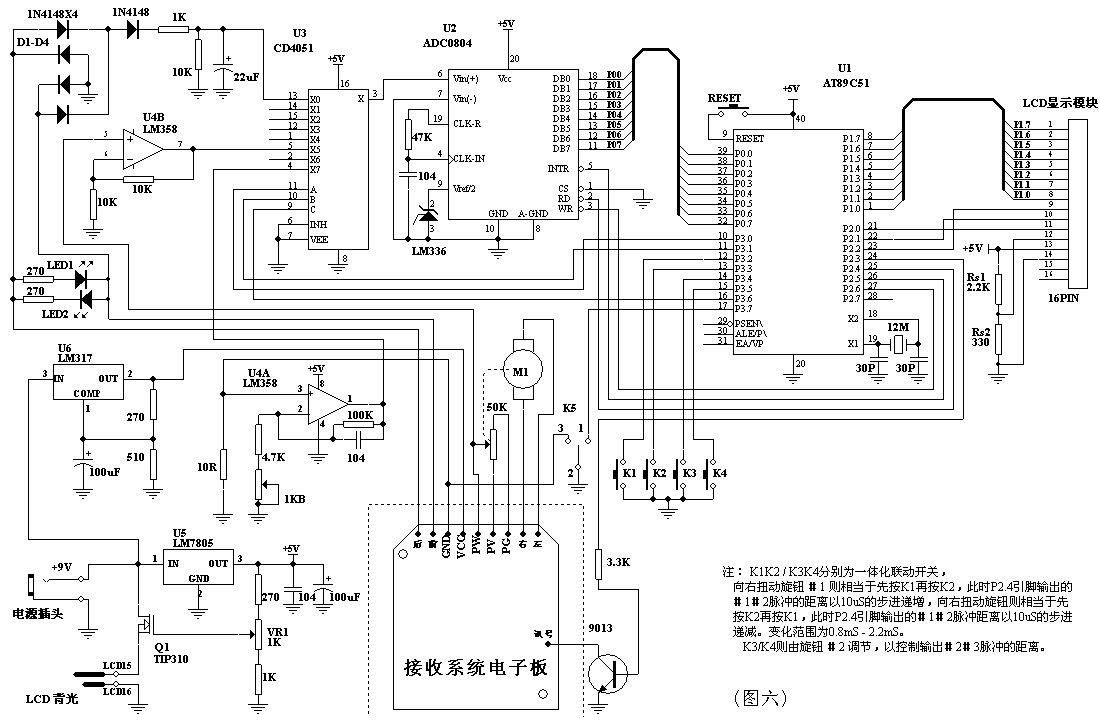
测试架的电路图如图六,该机架采用AT89C51配合普通的1602点阵式液晶显示模块,可以测试及显示目标板的工作电流,静态电流,驱动两个马达的讯号占空比(相对于最大幅度的百分比)等,因LCD屏幕显示内容有限,故增加K5用于切换测量项目和显示内容。系统提供一个可在图一规格范围内全程可调的方波脉冲讯号输出,该讯号由单片机U1内部给出并从P2.3输出,经9013缓冲后送入待测目标板作为输入讯号,讯号脉冲周期由K1/K2和K3/K4两对旋钮控制,可在0.8-2.0毫秒之间以0.01毫秒的步进可调。当然也可以将此讯号配用一个低功率27MHz振荡器调制后输出,这样更加可以测试待测目标板RF接收部分工作是否正常。
U6提供稳定的3.6V电源供目标板使用,U5则输出+5V作为整个测试系统的电源。U4A接成同向放大器,其3脚上10欧姆电阻上流过的是整个目标板的工作电流,而关闭由单片机P2.3输入的编码讯号则可以测试整机静态电流。该电流在10欧姆电阻上产生的压降经U4A放大后送入八选一IC-CD4051,作为一路测量讯号,另外还有两路被测讯号,一路是经D1-D4整流的目标板输出的前后驱动讯号,此讯号本来是PWM输出波形,因此经整流及RC滤波后输送给U3的X0输入端的电压幅度与PWM波形的占空比(即目标板输出的前后转马达驱动讯号)呈线性关系。另一路是PW引脚输入的左右偏转反馈讯号电压经U4B缓冲后送入八选一IC-CD4051,该输入讯号表征目标板输出的左右偏转角度。上述三路讯号由单片机U1分时选取送入ADC0804,转换为数值后由U1读取并送入LCD模块显示。当然,此测试系统也可以很容易的稍经修改用于发射板测试或者其它生产测试系统。
以上介绍的一套比较典型的比例遥控系统及其测试系统,希望能对促进国内玩具和车航模系统生产提供一些参考,及能给相关工程人员以一些借鉴和帮助。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。


